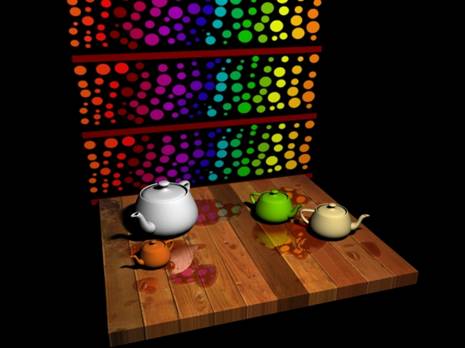
一. 参考给出图片完成雨伞的制作,并为之添加一个小场景使它更真实,根据自己的理解制作雨伞合上的动画。(素材无,请使用程序贴图,共60分)
注:请渲染出自己满意的效果图片3张(35分)以及动画一段。(25分)。


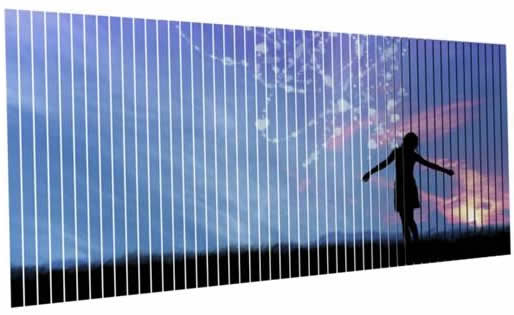
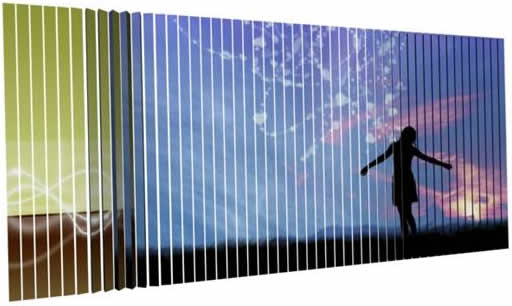
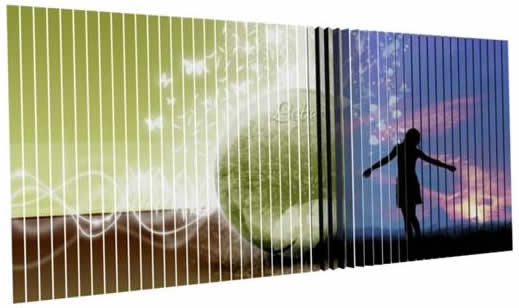
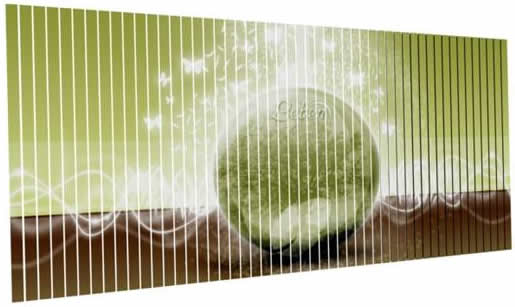
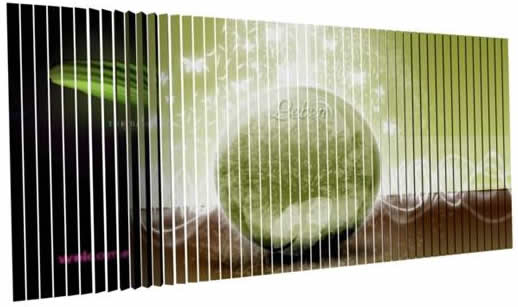
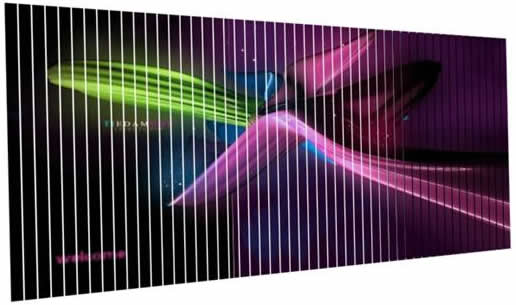
二. 利用自己所学知识完成如下图所示场景(三翻广告牌)模型及贴图,并为之添加三翻动作(可参考给出动画),添加合理的灯光及场景最终渲染一段动画(素材:“素材”下的“三翻广告牌”文件夹中的所有图片及动画,共60分)
注:请渲染出自己满意的效果图片3张(20分)以及动画(添加灯光及场景)一段(40分)。

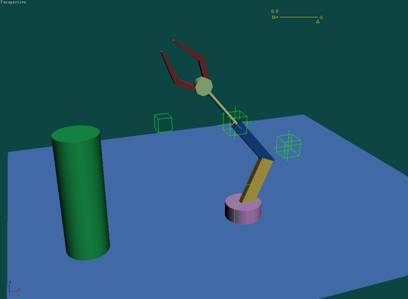
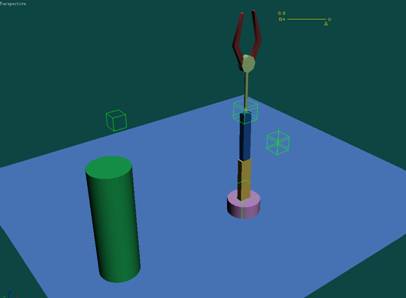
三. 用适当的建模工具和动画编辑工具做出以下动画(参看“机械手臂.avi”文件)(60分)
提示:
1、请在场景中创建以下部件:基座x1、下手臂x1、上手臂x1、伸缩轴x1、钳形物x2、圆柱x1、地板x1,并按下图所示摆好位置,模型的具体造型和复杂程度不做硬性要求,可自愿进行修改,对造型美观或结构复杂的模型酌情加分。
2、根据动画需要,请在Hierarchy面板中将各物体的轴心点进行调解、对齐。
3、利用Bones工具,正确创建两段骨骼,需带骨骼末端,大小与上、下手臂相似,并将其移动对齐到机械手臂。
4、使用Ik反向动力学系统连接相应的骨骼,形成动画所需要的骨骼连接。
5、创建两个Point帮助物体,如上图,一个放在机械手臂的正后方,将其设置为Ik Solover的Target。另一个对齐到Ik Solover的轴心点上,并将Ik Solover父子连接到上这个Point帮助物体上。
6、将机械手臂的各部分与骨骼系统进行父子关系连接,能够移动Ik Solover的轴心点的Point帮助物体时,整个机械手臂都能够随之正确移动,具体效果参看示意动画。
7、在基座处创建一个Dummy虚拟物体,并将其与基座对齐。将两个Point帮助物体都父子关联到这个Dummy虚拟物体上。
8、创建一个Slider控制器,并设置好相关参数。将两个钳形物的相关旋转分别Wire Parameters到Slider控制器的Value上,用Value控制钳形物的旋转。在表达式中可能需要加入DegToRad函数。注意是否加入负号。
9、设置动画相关参数,动画要求约为8秒,Pal制每秒25帧。
10、动画中,钳形物需要按示意动画进行开合,在拾取和放下圆柱时,要求在动画控制窗口中加入Link Constraint,以控制圆柱是否跟随机械手臂运动。其它的机械手臂动作需按示意动画做出相似的动作,并将其记录成关键帧动画。
创建动画预览,设置相关参数,选择Cinepak Codec解码程序,输出整个动画,大小为640x480。 |