(四) 每组比赛流程
注:上电之后,请勿触碰相机及镜头,以免有静电情况发生。 四.比赛规则(一) 决赛规则说明 1、比赛采用对抗形式:每队分别射门5球,守门5球,每射进一球计1分,守住一球计1分,以分高者胜出。(视觉需由参赛队自行设置) 2、当比赛结果为平局时,双方各击打一球,球停下后离底线距离近者胜出。 3、每射一球总共用时2分钟,超出各自规定时间则判对方得分。计时开始后,由射门方先将球放到固定位置(30S),示意完成后,守门方点击防守按键(30S),示意可以进行射门,再由射门方进行射门(30S),守门结束后,射门方和守门方均将机械手回机械原点(30S)。 4、在换边及比赛结束后,射门方与守门方需清空各自NJ程序及视觉程序。 (二) 犯规及扣分标准 1、射门及守门方均不得移动桌面,违规黄牌警告,判移动桌面方半场负,对方得5分。 2、射门方不得移动视觉检测设备(包括镜头、相机线缆、控制器等)、显示器、光源及支架,违规黄牌警告,判半场负,对方得5分。 3、射门及守门方均不得触碰对方机械手,违规黄牌警告,判移动对方机械手方半场负,对方得5分。 4、射门及守门机械手运行时均不得超出机械手活动范围并触碰到光源或场地,违规黄牌警告,判半场负,对方得5分。 注:得到二张黄牌后,换红牌罚出场,直接取消比赛资格。 (三) 射门及守门要求
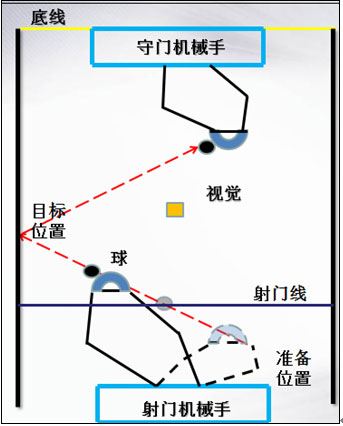
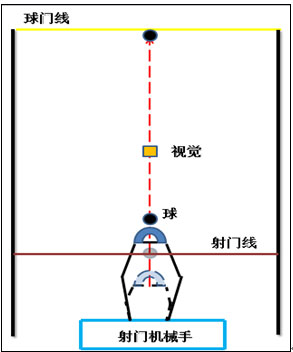
射门: 1、如图在机械手活动范围内,可以向任意方向,以小于3000mm/s速度;小于150000mm/s2加减速度;小于1500000mm/s3JERK值推射目标球。 2、在射门线上已标注坐标,球可放在射门线的任意位置作为射门起始位置(射门线仅供参考,可将球放在任意位置进行射门),并手动设置目标位置,使球向目标位置自动进攻(可反弹进攻也可直接进攻)。 3、进攻目的:使球躲过机械手阻拦,并接触底线 注:1、当守门方示意守门准备完成后,请在30S内将球击出。 守门: 1.视觉实时拍摄场地,获取目标球位置坐标,并且通过网络把坐标实时发送给PLC。 2.在PLC中编写算法,实时预判目标球的运动轨迹,并计算出机械手的拦截位置。 3.在机械手活动范围内(X:-230至230;Y:-292.35到-440)可以向任意方向,以小于3000mm/s速度;小于150000mm/s2加减速度;小于1500000mm/s3JERK值拦截目标球。 4、因反射后可能存在旋转现象,反射角不等于入射角,需通过上机实验,设置反射的偏移值。 5、守门目的:拦截目标球,使其不接触到底线。 注:1、在射门方将球放到固定位置,并示意放完球后,点击自动守门键,在射门完成前不可再做其他操作。
1、由抽签决定哪方先击打,击打方可先调试10分钟,后将球放于任意位置进行击打;一方击打完后由另一方调试并击打。 2、如图在机械手活动范围内,可以向任意方向,以小于3000mm/s速度;小于150000mm/s2加减速度;小于1500000mm/s3JERK值击打目标球。 3、在射门线上已标注坐标,球放在射门线的任意位置作为击打起始位置(射门线仅供参考,可将球放在任意位置进行击打) 4、击打目的:使球停下位置尽量接近底线(可反射) 5、测量方法:使用直尺测量。 (五) 评审说明 1、现场评审委员:由非带队评审教师与OMRON工程师组成 2、评审标准:按照比赛规则进行计分、扣分。
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Copyright © 2006 - 2014 www.itatedu.com All Rights Reserved. |