第九届全国信息技术应用水平大赛比赛说明
(比赛科目:智能水中机器人技术应用与设计)
一、指导原则
· 通过水中机器人的设计与应用锻炼推动高校工程教育发展、促进综合性技术人才培养;
· 利用机器人技术的综合性,培养学生机械组装、电路设计、编程调试等综合应用能力;
· 利用机器人技术的多样性,培养学生创新意识、协作精神、团队合作等工程实践素养;
· 竞赛与教学相结合,通过竞赛提高教学质量,通过教学促进竞赛水平;
· 提高高校工程教育发展、促进综合性技术人才培养。
二、参赛说明
·面向全国全日制在校大学生(高职、本科、研究生);
·比赛以学校为单位报名,不接受个人报名,不接受跨学校联合组队报名;
·比赛为团体赛,参赛者以团队形式参赛,参赛人数每个团队最多不超过3名队员和2位指导教师,所有人员一经报名,不得更改;
·报名方式:
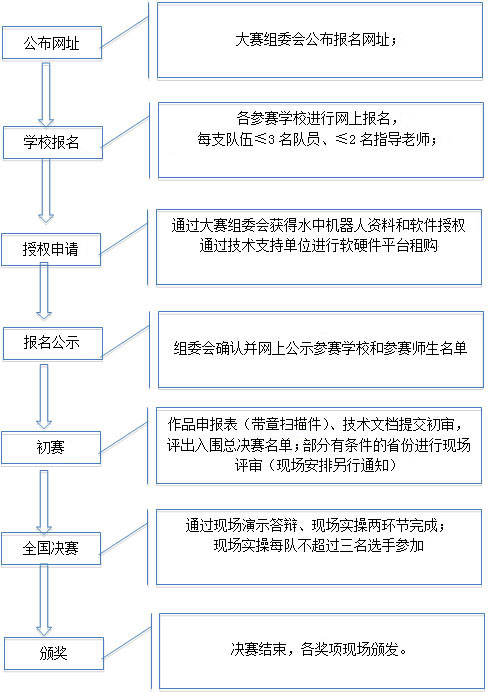
→ 第一步:网上公布报名网址;
→ 第二步:以学校为单位进行报名,学校负责老师登录大赛管理报名系统,录入参赛队伍报名信息,组委会审核后通过者报名成功。(注意:报名信息一经录入,不得更改)
→ 第三步:组委会在规定时间进行网上公示,确定最后参赛队伍名单。
参赛队员基本知识要求
1) 多机器人协作基本知识
2) C++语言编程技能
3) 电路原理、接线与安装基本知识
4) 2.4G通讯技术基本概念及应用
5) 机械设计与组装基本知识
·比赛采用初赛、决赛两级赛制。
·初赛时,各参赛队将作品申报表(带章扫描件)、设计技术文档提交大赛组委会,组委会组织专家进行评审,并据此评出入围全国总决赛作品名单。
·(有条件的省份将通过现场评审形式进行,现场评审有关安排另行通知)
·全国总决赛集中进行,通过现场演示答辩和现场实操两个环节评出全国特、一、二、三等奖各奖项;
·详细比赛流程如下图:
·赛程安排
学校报名:2014年4月5日――-2014年4月20日
作品提交:2014年4月30日前
初赛评审:2014年5月1日――2014年5月10日
决赛入围名单发布:2014年5月12日前
全国总决赛:2014年5月24-26日
颁奖典礼:2014年5月26日
四、比赛平台与环境说明
·全局视觉比赛平台
全局视觉组所选用的竞赛系统为北京大学智能控制实验室开发的多水中机器人协作平台,如下图所示。
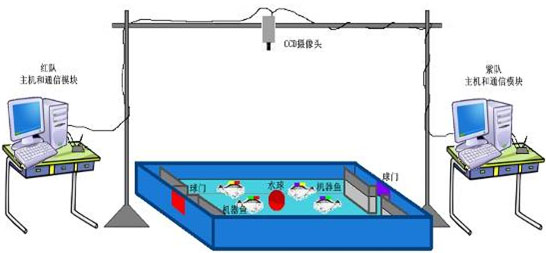
该协作平台包括:水中机器人执行系统、无线通讯系统、图像处理系统、策略执行系统四部分。
水中机器人执行系统为三关节机器鱼,该款机器鱼是仿生机器人研发的最新成果,具有极高的运动性能,能够在狭小的水面上实现转弯、掉头等运动,能够真实模拟鱼类游动达到以假乱真的效果。
该机器鱼的各个关节可以独立控制,并可以扩充增加胸鳍、重心调节等装置。通过底层运动控制函数的调整,可以改变机器鱼的运动模态和运动效果,从而实现机器鱼在多种运动方式之间的切换,从而更加逼真的模拟鱼类的游动。
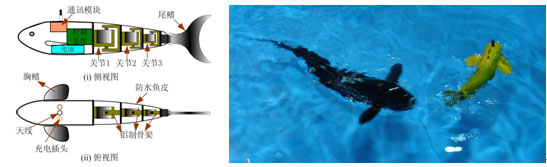
先后有多位国家领导人莅临参观机器鱼,并且多次被央视《新闻联播》报道。

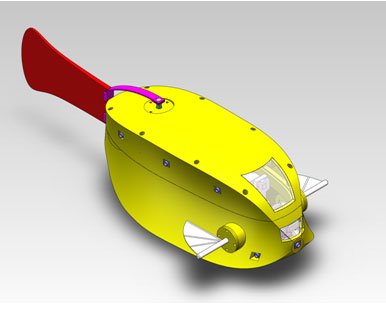
·自主视觉比赛平台
自主视觉比赛采用北京大学智能控制实验室开发的自主视觉机器鱼作为比赛平台。该平台为基础运动平台,基于此平台可以进行多种扩展。
该平台采用模块化的硬件设计结构,嵌入式系统作为图像处理及策略控制模块,采用STM32作为运动控制模块和传感采集模块。具有1个内置IMU、 1个摄像头、1个压力传感器、1个红外传感器等传感装置,以及1个尾鳍和2个胸鳍共三个可独立控制的摆动装置。可进行重心调整机构、机械手等操作机构的扩展。
五、比赛内容
参赛团队需从以下题目中结合自身团队经验选择一项或者多项作为参赛题目;
基本器材由组委会统一提供,现场搭建,辅助器材各队自己设计并携带;
参赛团队可选题目:
题目1:机器人创新创意
参赛队伍根据水中的实际应用(搜救、探测、侦查、作业、娱乐等)进行自由创新创意,设计相关水中机器人。在决赛阶段进行实物展示,展示内容包括但不限于实物、PPT、录像等。专家根据所设计的参赛作品的实际应用前景、设计功能、产品现场演示、现场讲解等进行评分。
题目2:全局视觉机器人水球2V2
参赛队伍根据组委会统一提供的设备散件(运动模块、控制模块、通讯模块等)和自带的标准水中机器人竞赛设备,进行现场组装。组装完毕后使用组委会提供的多机器人协作平台进行2V2的水中足球比赛,足球比赛规则与人类足球比赛规则类似。参加比赛的水中机器人必须包括现场组装的水中机器人设备。
题目3:全局视觉机器人抢球博弈
参赛队伍根据组委会统一提供的设备散件(运动模块、控制模块、通讯模块等)和自带的辅助设备(相关配件和一个自行设计的水中机器人),进行现场组装、现场编程(编程设备自带)。组装完毕后,两台水中机器人通过组委会提供的多机器人协作平台进行将水池中漂浮的多个物体搬运到指定地点。根据自带辅助设备的加工难度、设计外观、搬运物体数量来取得像样的分数,
题目4:全局视觉机器人创意编队
参赛队伍根据组委会统一提供的设备散件(运动模块、控制模块、通讯模块等)和自带的辅助设备(相关配件和一个自行设计的水中机器人),进行现场组装、现场编程(编程设备自带)。组装完毕后进行编队控制,类似于花样游泳。根据自带辅助设备的加工难度、设计外观、设计编队的难度不同,相应的技术得分也有所不同。
题目5:全局视觉水中救援
参赛队伍根据组委会统一提供的设备散件(运动模块、控制模块、通讯模块等)和自带的辅助设备(相关配件和一个自行设计的水中机器人),进行现场组装、现场编程(编程设备自带)。组装完毕后使用对被困与水中的救助对象实施救援,水中有5个救援对象,每个救援对象的救援难度都不同,对应相应的分数。根据救援机器人辅助设备的创意、救援区得的分数、救援时间等进行评价。
题目6:全局视觉机器人水中角力
参赛队伍根据组委会统一提供的设备散件(运动模块、控制模块、通讯模块等)和自带的辅助设备,进行现场组装、现场编程(编程设备自带)。组装完毕后分组进行角力,力量大的胜出。最终决出名次。
题目7:自主视觉机器人水中搜救
参赛队伍根据组委会统一提供的设备散件(运动模块、控制模块、通讯模块等)和自带的辅助设备(机械手臂相关配件和),进行现场组装、现场编程(编程设备自带)。组装完毕后进行整个水域的搜救,搜寻不同的目标物,根据找到目标物并标记的数量多少获取不同的分数。
题目8:自主视觉机器人水球1V1
参赛队伍根据组委会统一提供的设备散件(运动模块、控制模块、通讯模块等)和自带的辅助设备(机械手臂相关配件和),进行现场组装、现场编程(编程设备自带)。组装完毕后分组进行水球比赛,比赛规则同人类足球的比赛规则。
题目9:机器人仿真花样游泳
在组委会统一提供的标准仿真平台中进行多个水中机器人运动的规划,类似于花样游泳。专家根据花样游泳的技术难易程度和创意精彩程度进行评分。
六、评审细则
·初赛评审:
初赛评审主要是通过对参赛队提交的技术文档进行审议,根据其设计的完整性和技术难度评出入围决赛的队伍。
初赛提交参赛材料包括:
1) 作品申报表(要求为带章扫描件);
2) 技术文档:作品设计报告和设计程序(要求为源程序,可执行、可仿真)。
(特别说明:参赛材料以电子邮件形式发至大赛指定邮箱,邮件标题命名规则为“参赛学校名称+作品名称”)
·决赛评审:
决赛由现场演示答辩、现场实操两个环节组成,两个环节综合评出全国特等奖和一、二、三等奖,两个环节所占分值比例为70%:30%。
决赛用设备散件由组委会提供,其他辅助设备和作品展示所需设备、用品等选手自备。
七、奖项设置
根据作品完成情况及选手实操成绩综合评出全国特等奖一名,一、二、三等奖若干名。
为了促进技术进步,激励科技创新,创新创意题目将设立奖金制度,具体如下:
特等奖壹名,奖励人民币10000元
金 奖贰名,奖励人民币5000元
银 奖伍名,奖励人民币2000元
铜 奖拾名,奖励人民币1000元