第九届全国信息技术应用水平大赛比赛说明
(比赛科目:“Omron杯”Sysmac自动化控制应用设计)
一、比赛形式
● 比赛为团体赛,参赛者以团队形式参赛,每支队伍不超过3名学生和2名指导教师。
● 初赛阶段:本项比赛内容为自动化控制应用设计,初赛采用场外作业、提交作品方式,参赛团队在指定时间按要求完成作品设计并提交:
(1)作品申报表(见附件)电子档;
(2)初赛作品:参赛团队提交仿真程序(包括触摸屏画面)电子档及程序设计说明。
备注:电子档初赛作品发送到大赛组委会指定邮箱。作品通过初审选拔出进入决赛的作品和参赛队。
● 决赛阶段:决赛由现场机器演示、工程答辩、实操比赛三个环节组成,由评审专家组现场打分。
● 比赛重点考察学生自动化控制应用设计能力、工程实践能力、团队协作意识、自主学习能力、解决实际工程问题的能力和综合工程实践素养。
二、参赛人员
● 参赛对象
◆ 比赛面向全国全日制在校大学生(高职、本科、研究生)
◆ 参赛人员基本知识要求
◆ 电气原理图基本知识
◆ 电气接线与安装基本知识
◆ PLC应用基本知识
◆ 电机驱动应用基本知识
◆ 人机界面通讯基本知识
◆ 自动控制系统基本知识
◆ 视觉原理及编程操作
三、控制对象说明
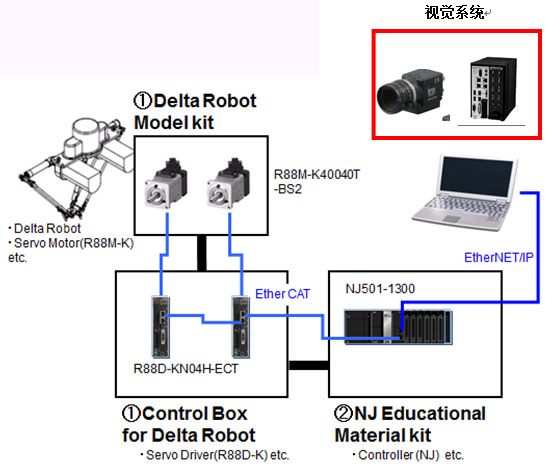
(一)被控对象:所选被控对象为两自由度并联机械手。两自由度并联机械手具有平稳,准确,快速等优点,在食品加工,包装,物流等行业使用非常广泛,因此选用该装置作为本次比赛的被控对象,可以很好地体现NJ控制器的高速高精度特点。该装置由两个伺服电机安装在静平台上,带动主动臂动作,主动臂连接从动臂动作,从而控制动平动盘的移动,如图1:

图1 被控对象: 两自由度并联机械手机构
系统配置
四、比赛要求及评审方式
比赛要求:
本次比赛是以模拟足球点球赛形式对机械手进行控制。每2队分别进行比赛,一轮比赛分上下半场进行,每半场5个球。
举例说明:
如A队、B队进行比赛,上半场A队为进攻方,B队为防守方,A队控制机械手进行进攻,B队负责防守,攻入一球A队得10分,守住1球B队得10分。下半场双方交换场地,B队为进攻方,A队为防守方。依次类推,比赛全部结束后记录各队的得分。
示意图:
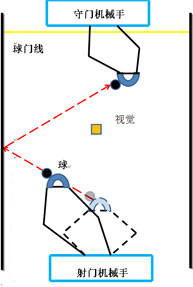
进攻:
1.在机械手活动范围内,可以向任意方向,以小于3000mm/s速度推射目标球;
2.进攻目的:使球躲过机械手阻拦,并越过球门线。
防守:
1.视觉实时拍摄场地,获取目标球位置坐标,并且通过网络把坐标实时发送给PLC;
2.在PLC中编写算法,实时预判目标球的运动轨迹,并计算出机械手的拦截位置;
3.控制机械手快速移动到拦截位置,拦截目标球。
注:具体技术参数会另行通知。
● 初赛评审方式:
1.参赛团队需提交:作品申报表:电子档或者纸质档任一份;
初赛作品:包含NJ控制器和NS触摸屏程序,包含程序设计说明(电子档或纸质档均可)。
备注:电子档初赛作品发送到大赛组委会指定邮箱,或者刻录光盘一份寄至大赛组委会。
2.初赛作品评审标准(详见《附件1--初赛要求细则》中的内容)
| 初赛作品评审标准 |
| 项目 |
功能要求 |
合否 |
备注 |
在符合操作
流程的前提
下进行以下
项目的评审 |
程序中必须包含LD语言,ST语言,Motion FB |
|
|
| 编写机械手仿真程序:编写能够通过NS触摸屏把机械手动作仿真出来的程序 |
|
|
| 通过网络变量编写NS触摸屏程序(具体功能见NS触摸屏程序要求) |
|
|
| 机械手指定位置绝对移动程序(在机械手允许的活动范围内,输入目标点的坐标,机械手可以运动到指定位置) |
|
|
| 点动程序(通过点动按钮可以实现机械手上下左右点动) |
|
|
| 机械手活动范围超出判断报警程序(设置机械手活动范围以外的位置时,机械手不动作) |
|
|
机械手自动防守程序
1.视觉实时拍摄场地,获取目标球位置坐标,并且通过网络把坐标实时发送给PLC(评审通过仿真来实现);
2.在PLC中编写算法,实时预判目标球的运动轨迹,并计算出机械手的拦截位置;
3.控制机械手快速移动到拦截位置,拦截目标球。 |
|
|
| 运动学正推程序(编写能够根据主动臂伺服旋转角度推出平动盘坐标的程序) |
|
|
| 机械手绝对移动目标点的坐标设定和绝对移动动作按钮在NS程序中实现 |
|
|
| 机械手上下左右点动按钮要做在NS程序中 |
|
|
| 要在NS程序中显示机械手活动范围超限报警信息 |
|
|
| 机械手要具备停止功能并在NS触摸屏上实现 |
|
|
| 作品提交分数 |
初赛作品提交时间10月10日-10月24日,每个团队限制提交1次,请标记参考“20141010-北京大学-自强队”;
初赛作品提交加分说明:优先提交作品可享受更多加分,从10日至24日,作品提交加分分别从15分递减至1分,即10月10日提交加15分,10月11日提交加14分,以此类推,10月24日提交加1分
|
|
|
● 决赛评审方式:
决赛阶段由现场工程演示,工程答辩,实际比赛三个环节组成。
工程演示:参赛团队以PPT形式介绍工程背景,对其组成结构、设计原理、功能。
控制算法实用性、可行性进行描述,时间控制在10分钟以内。
工程答辩:参赛团队现场回答专家评审针对作品提出的问题,时间控制在10分钟以内。
实际比赛:参赛选手在同一实践平台上进行比赛,每2队为一组进行,分上下半场,每半场5个球,半场结束后更换场地,依次类推,记录最终分数,时间控制在40分钟以内。
| 决赛现场评审标准 |
| 项目 |
功能要求 |
分值 |
备注 |
| 1、工程演示(10分钟) |
工程背景 |
5 |
|
| PLC控制编程思想及技巧 |
10 |
|
| 2、工程答辩(10分钟)
|
决赛现场回答专家评审针对作品提出的问题 |
10 |
|
| 3、实际比赛
(40分钟)
|
电气接线:包括NJ与继电器,NJ与伺服 |
5 |
|
| PLC控制:PLC控制程序调试 |
5 |
|
| 人机界面:组态监控界面的简单设计与调试 |
5 |
|
| 运行:进攻及防守 |
100 |
|
| 4、其他 |
工程演示表达能力 |
5 |
|
| 实操调试团队配合 |
5 |
|
五、附注
● 赛程安排:
◆ 参赛报名:2014年5月1日――2014年9月30日
◆ 初赛提交:2014年10月10日――2014年10月24日
◆ 初赛评审:2014年10月10日——2014年11月10日
◆ 公布决赛名单:2014年11月15日
◆ 决 赛:2014年12月6-7日
◆ 颁奖典礼:2014年12月8日
● 作品报送:
◆ 收件人:甄浩然
◆ 地 址:北京市西单大木仓胡同37号教育部业务楼416室(100816)
◆ 电 话:400-1010-875,010-58930031
◆ 邮 箱:iaat@moe.edu.cn
● 备注:
◆ 初赛需提交内容:作品申报表――电子档文件一份; 初赛作品仿真程序(包括触摸屏程序)电子档、程序设计说明(仅限电子档) 。电子档发送到大赛组委会指定邮箱,超过10M的作品请传到网盘发链接给组委会;
◆ 初赛作品提交时间10月10日-10月24日,每个团队限制提交1次,时间标记请参考“20141010-北京大学-自强队”;
◆ 初赛作品提交加分说明:根据作品提交时间早晚加分依次递减,优先提交作品可获得更多加分,晚一天提交,则加分减少1分,即10月10日提交加15分,10月24日提交加1分;
◆ 参赛团队可向组委会申请大赛校园行活动及参与免费的师资培训活动”;
◆ 参赛团队在比赛准备期间,可以参考“全国工业自动化人才认证培训项目”工作网站 www.iaat.org.cn 相关比赛视频教程、技术参考资料等;
◆ 组委会联系人:
◆ 甄浩然 400-1010-875/010-58930088-612 iaat@moe.edu.cn
“Omron杯”Sysmac自动化控制应用设计科目作品申报表
| 作品名称 |
|
| 申报单位名称 |
(此处加盖学校公章) |
| 参赛队员 |
|
| 指导教师 |
|
| 联系方式 |
联系人 |
|
电话 |
|
| 手机 |
|
邮箱 |
|
| 作品简介 |
(含开发背景、结构说明、功能与使用说明等,字数不超过1000字) |
| 设计说明 |
(含原理图、设计原理、设计方案等,字数不超过3000字) |
| 作品特色 |
(含作品的先进性、实用性、创新性等,字数不超过500字) |